1. 라즈베리파이
- 개발: 2006년 영국 에반업튼 박사가 개발.
- 목적: 영국 라즈베리 파이 재단이 학교, 개발도상국에게 컴퓨터 보급하기 위해 만든 싱글보드 컴퓨터.
- 특징(3): 저렴한 가격, 신용카드 크기, 컴퓨터로 동작할 정도로 충분한 성능
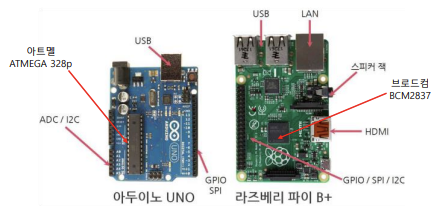
2. 라즈베리파이 VS 아두이노
- 아두이노: 펌웨어를 구동하는 임베디드 보드
- 라즈베리파이: 운영체제(리눅스)를 구동하는 컴퓨터. (ARM CPU)

3. 라즈베리 파이 특징(10) - Model 4B 기준.
- 프로세서: .5GHz로 클록된 네 개의 ARM Cortex-A72 코어가 있는 프로세서를 사용.
- 메모리: DRAM은 2, 4, 8GB. Micro-SD카드는 클래스 4이상 권장.
- 전원: 5V DC 전원을 USB 플러그로 입력. 최대 2.5A 전류 입력
- 비디오 출력: HDMI, Dual 4K 비디오.
- 오디오 출력: 표준 3.5mm 오디오
- 이더넷: RJ45 커넥터
- USB: 단자 4개
- 디지털 신호레벨: 3.3V - High, GND(0V) - Low. (cf. 아두이노는 5V, 0V)
- 인터럽트 조건(4): HIGH, LOW 레벨 감지, HIGH->LOW, LOW->HIGH 변화 감지
- 운영체제(3): 리눅스 기반으로 만든 Raspberry Pi OS, 우분트메이트, 윈도우즈 10 IoT core
4. 라즈베리파이 GPIO 핀
- GPIO: 다용도 입출력 포트
- GPIO 핀 0과 1은 보드에 존재하지만 (물리적 핀 27 및 28), 고급 사용을 위해 남겨두어야함.

5. 라즈베리 파이 운영체제
- RPi OS: RPI의 공식 운영체제. 라즈베리파이 재단에 의해 지원됨. piwheel.org 웹에서 앱패키지 제공.
- Raspberry Pi Imager: 라즈베리 파이 장치에 os를 설치하는데 사용되는 도구.
- 라즈베리파이 장치에 OS 설치하기
- 컴퓨터에 SD카드 삽입.
- 저장소로 SD카드 선택.
- Raspberry Pi OS (64bit) 설치.
- 설치가 끝나면 SD카드를 라즈베리파이에 장착.
- 마우스, 키보드 연결.
- 파워 꽂으면 부팅 시작.
- 초기 설정. (아래 그림 참고)

- 라즈베리 파이 OS 업데이트
(1) $ sudo apt-get update: 패키지 목록 업데이트
(2) $ sudo apt-get upgrade: 패키지 업그레이
(3) $ sudo apt-get rpi-update: 펌웨어 업데이트
6. 라즈베리 파이 소프트웨어
- (메뉴-> 기본 설정 -> 권장소프트웨어) Thonny설치. (이외: LibreOffice(오피스업무), Mathematica(계산))
- piwheel.org에서 패키지 제공하지만, 64bit PI OS는 지원 안함. 필요시 apt, apt-get으로 설치 가능.
- OpenCV, Tensorflow 설치.
- Keras, Pandas 설치.($ pip install keras)
- Exfat 설치(USB에 널리 사용되는 파일 시스템)( $ sudo apt install exfat-fuse )( $ sudo apt install exfat-utils )
7. 원격 접근 설정
: Menu->기본 설정->Raspberry Pi Configuration -> Interface -> VNC나 SHH 켠 후 IP 주소 확인.
- VNC: PC에 Real VNC클라이언트 설치 후 실행. IP 주소로 접속.
- SSH: 윈도우에서 PowerShell 실행 후 다음 명령어 실행( –PS C:\User\User> ssh username@ip_addr )
8. RPi Camera
- 패키지 설치: $ sudo pip install ”picamera[array]”
- RPi Camera 연결
- 카메라 연결: 가드 위로 올리고 케이블 삽입. 삽입 후 가드 내리기.
- 카메라 제거 시: 가드 올리고 제거.
- 카메라 동영상 찍기: $ libcamera-vid --frames 300 --qt-preview -o source.h264
(libcamera라이브러리를 사용해 비디오를 캡쳐해라) (300개 프레임을 캡쳐해라)
(퀵타임 미리보기 활성화) (비디오 저장될 출력파일 지정)
from picamera2 import Picamera2
from libcamera import controls
picam2 = Picamera2() # Picamera2 클래스의 인스턴스 생성
picam2.start(show_preview=True) # 미리보기 활성화, 카메라 시작
picam2.start_and_capture_files("fastfocus-test{:d}.jpg", num_files=3, delay=0.5)
# 경로로 파일 지정하고, 3장의 이미지를 캡쳐, 이미지간 딜레이는 0.5
picam2.stop_preview() # 미리보기 중지
picam2.stop() # 카메라 중지
9. 기타
- sudo: Superuser Do로, 관리자 권한으로 명령어 실행.
- apt: 패키지 관리 도구. 패키지 설치, 업데이트, 제거.
- pip: Pip install package-name으로, 파이썬 패키지 설치하는 데에 사용.
- 시리얼 통신: 직렬 통신
- 소스코드 -> 빌드 -> 실행파일 -> 실행
'Computer Science > Embedded System Design' 카테고리의 다른 글
| [임베디드] 3장 라즈베리파이 실습 (2) (0) | 2023.10.20 |
|---|---|
| [임베디드] 3장 라즈베리파이 실습 (1) (0) | 2023.10.20 |
| [임베디드] 1장 아두이노보드 실습 (2) (0) | 2023.10.20 |
| [임베디드] 1장 아두이노보드 실습 (1) (0) | 2023.10.20 |
| [임베디드] 0장 임베디드 시스템과 아두이노 보드 (2) | 2023.09.20 |



